Kangaroo Simplified Model#
The Kangaroo Simplified Model is a reduced representation of the full kinematic and dynamic system, designed to retain all essential information while avoiding the use of closed kinematic chains—structures that are not fully supported by many simulators or kinematics/dynamics libraries.
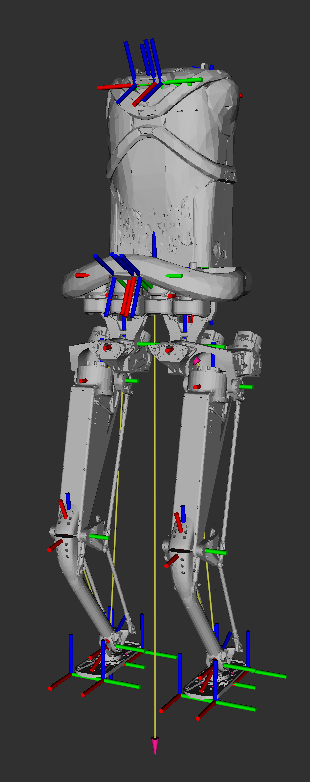
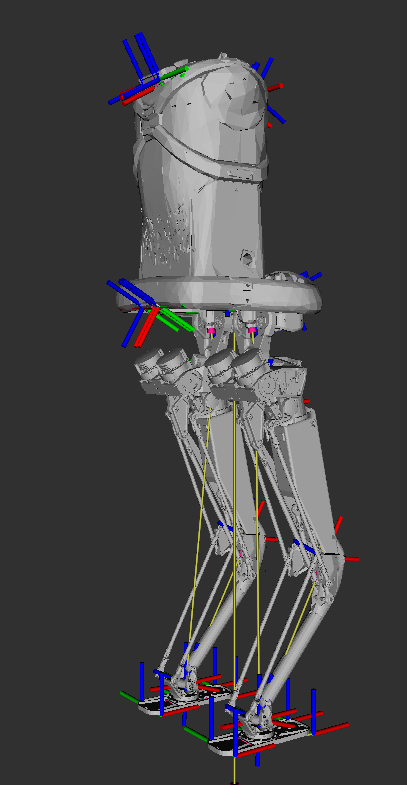
This simplified model features 16 degrees of freedom (DOFs) in the lower body: 12 actuated and 4 passive. It includes the primary links and offers a realistic approximation of the robot’s mass distribution and inertias. Each leg incorporates a single closed linkage connecting the femur and knee joints. These joints are passive and are connected via a virtual prismatic link that emulates the leg-length mechanism.
In the real robot, commands and state feedback must be accurately enforced at actuator-level. The nonlinear transmission ratios introduced by the closed linkages are embedded within the ROS Control Transmissions, which handle the conversion between joint-space commands from ROS controllers and actuator-space signals, as well as the reverse translation for state feedback. This makes the behavior of the closed linkages completely transparent to the user, who interacts only with joint-level commands and state.
IMPORTANT
This is the default model loaded in ROS and the one used by all provided controllers.