Robot Design#
Kangaroo incorporates custom linear actuators with integrated force sensors which provide a large range of motion as well as high speed and torques at the joints. The innovative design has taken advantage of nonlinear linkage mechanisms to place all the actuators close to the trunk, making Kangaroo closer to classical template models. The non-linear transmission parameters have been optimised to achieve the necessary speeds and torques for jumping but require only low power whilst standing and walking.
The Kangaroo robot has a total of 12 Degrees of Freedom (DoF), 6 per leg.
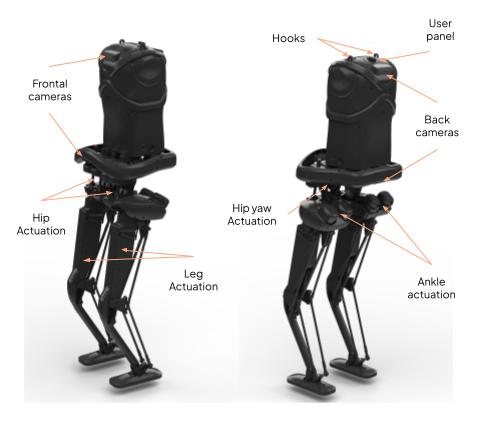
The linear actuators in front of the robot are the actuation of the hip, providing pitch and roll motion of each leg.
The hip yaw is actuated by a system hidden inside the protective ring at the hip level of the robot.
The actuation of the leg is inside the femur link. This provides a vertical motion of the foot with respect to the hip.
The ankle actuation is located in the back of each leg of the robot. This provides the foot with pitch and roll motion.