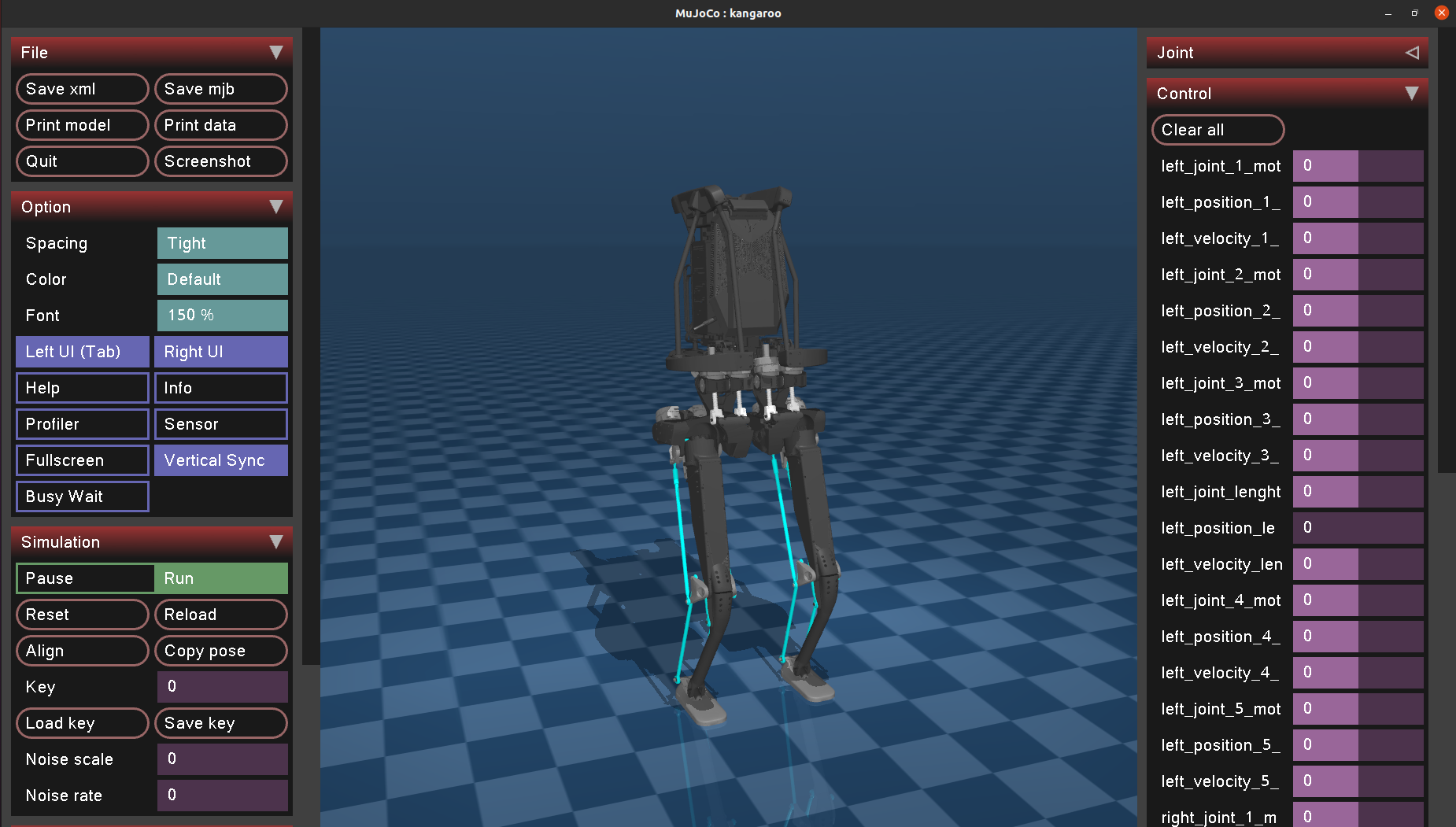
Kangaroo Full Model#
The Kangaroo Full Model captures the complete kinematic and dynamic behavior of the robot, including all mechanical interactions and structural complexities.
The robot is actuated by 12 linear actuators—6 per leg—while the entire lower body comprises 76 degrees of freedom (DOFs): 12 actuated and 64 passive. Most actuators (5 out of 6 per leg) are located at the hip, with only one positioned at the femur. Actuation is transmitted to the joints through a system of closed and parallel mechanisms, which include multiple four-bar linkages and differential linkages. These mechanisms transform linear actuator motion into the desired joint rotations.
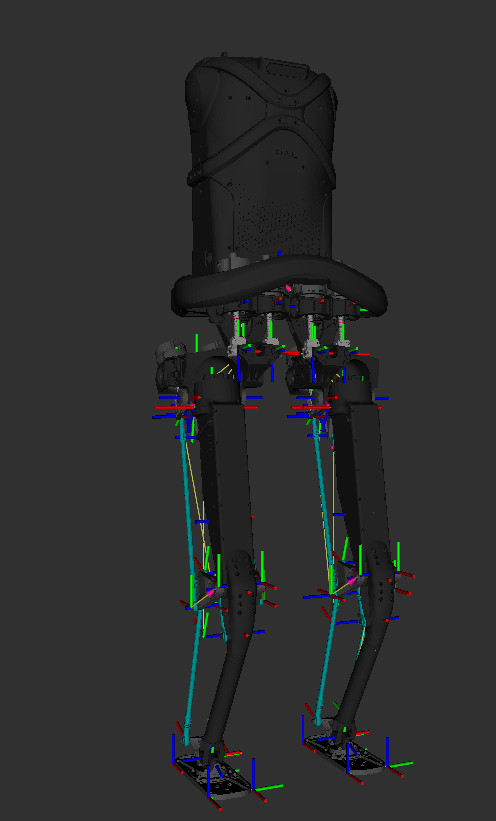
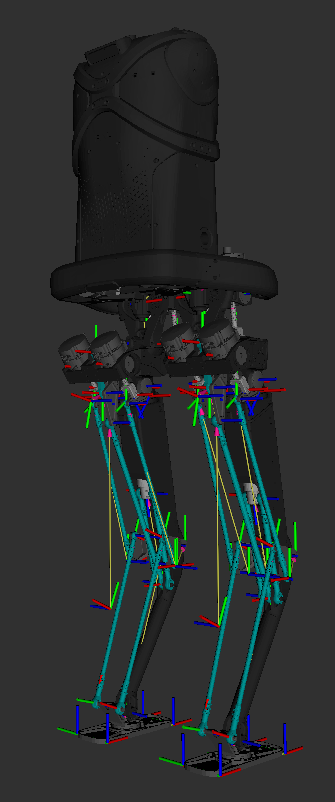
To model this complex structure, a constraint-based formulation is employed. In this approach, each closed-loop linkage is “opened” at one joint to break the loop, and a mechanical constraint is introduced to preserve the physical behavior of the original closed chain.