Extracting & Visualizing Robot Data#
Record a Rosbag#
To record information from your experiment, it can simply be done using rosbag.
rosbag record -o NAME_OF_THE_BAG /introspection_data/names /introspection_data/values
Once you want to stop recording just cancel it using Ctrl-C
Then copy the file in your development PC
scp -C NAME_OF_THE_BAG pal@development:PATH_TO_SAVE_IT
Visualize variables#
In your development PC you can plot all the data using PlotJuggler.
rosrun plotjuggler PlotJuggler
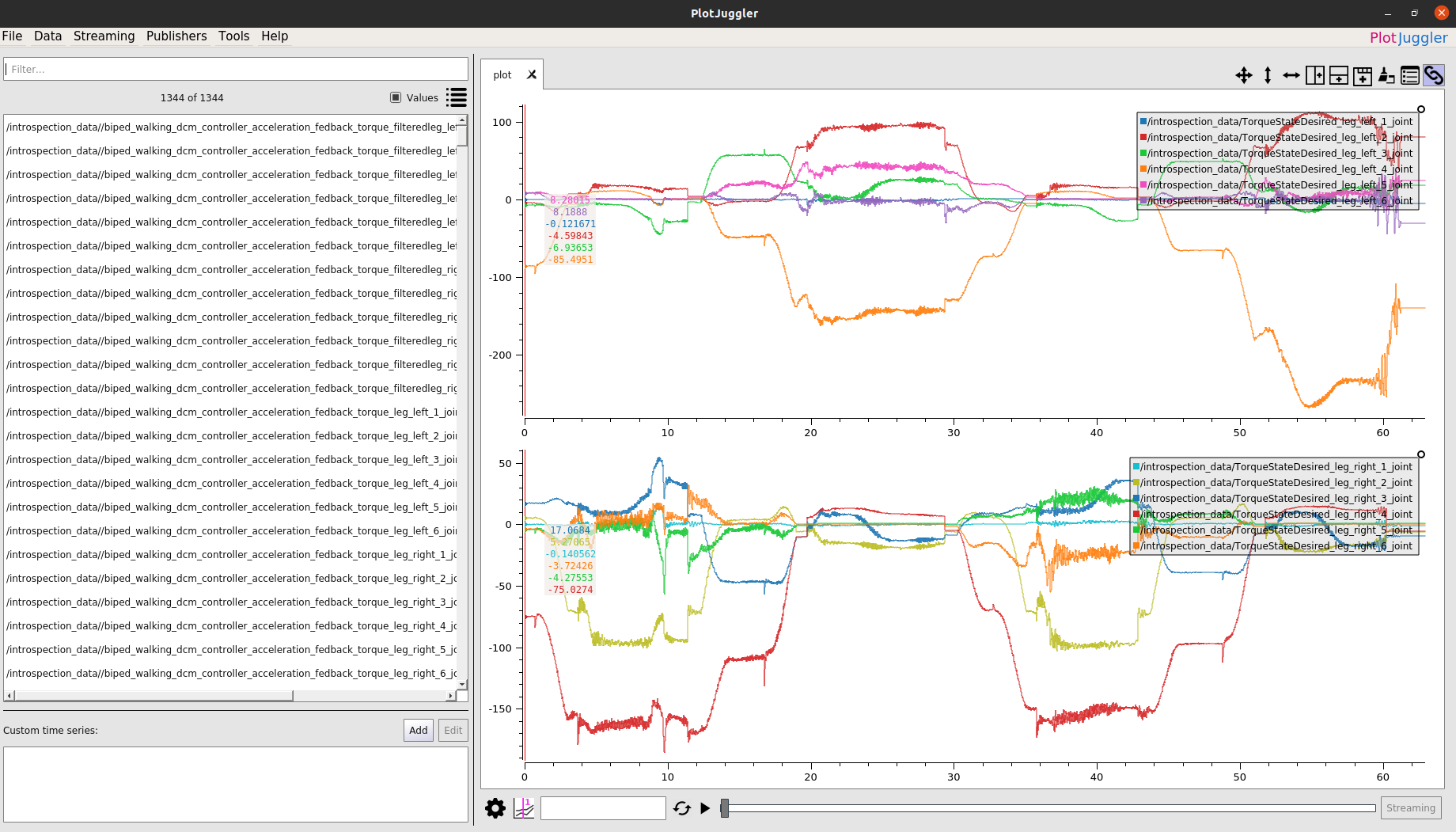
Once PlotJuggler is open load the bag: File -> Load Data and select the recorded rosbag.
Then select the variable you want to visualize and drag it into the
Record new variables#
In order to record new variables it will be necessary to register them inside your code as follows.
#include <pal_statistics/pal_statistics.h>
#include <pal_statistics/pal_statistics_macros.h>
#include <pal_statistics/registration_utils.h>
...
double aux = 0;
pal_statistics::RegistrationsRAII registered_variables_;
REGISTER_VARIABLE("/introspection_data", "example_aux", &aux, ®istered_variables_);
Eigen::Vector3d vec(0,0,0);
REGISTER_VARIABLE("/introspection_data", "example_vec_x", &vec[0], ®istered_variables_);
REGISTER_VARIABLE("/introspection_data", "example_vec_y", &vec[1], ®istered_variables_);
REGISTER_VARIABLE("/introspection_data", "example_vec_z", &vec[2], ®istered_variables_);