RQT Joint Trajectory Controller#
The rqt_joint_trajectory_controller is a GUI for interacting with the JointTrajectoryControllers using sliders.
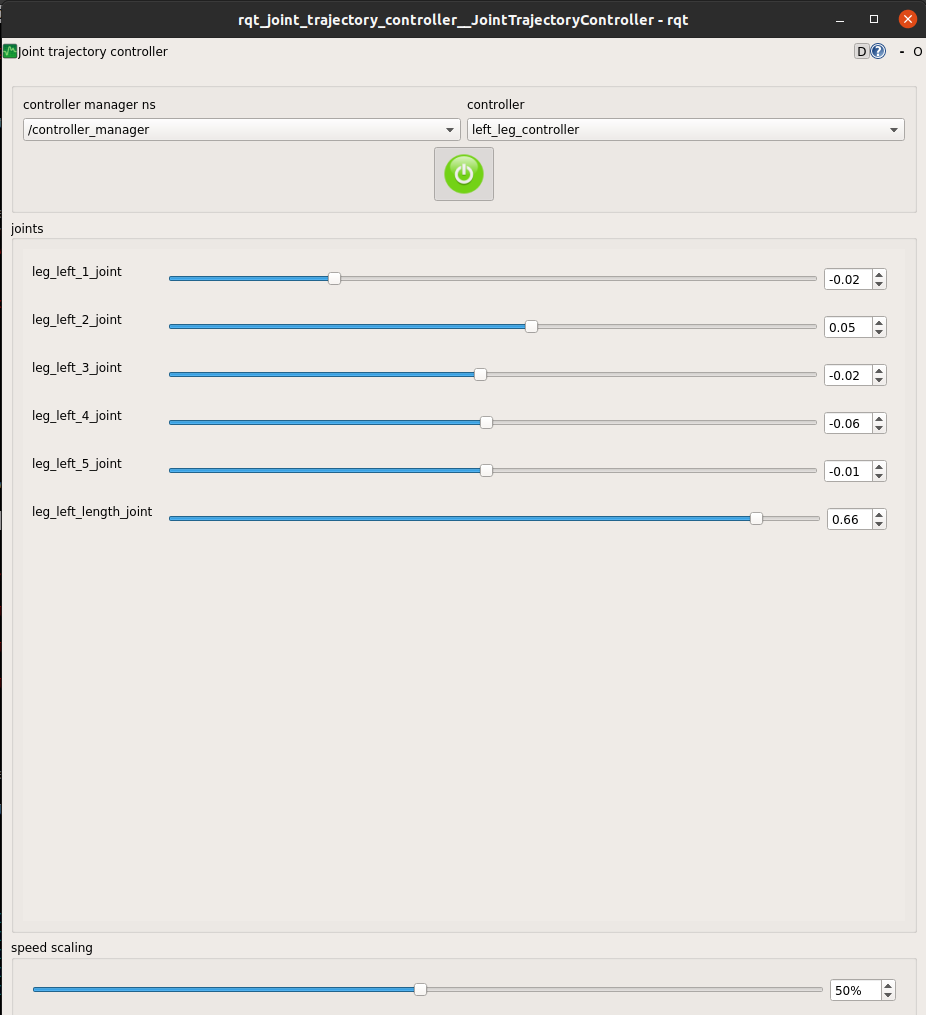
Connect a Terminal to the robot and run.
rosrun rqt_joint_trajectory_controller rqt_joint_trajectory_controller